Note
Click here to download the full example code
Region Level Trajectory reconstruction#
This example shows how to calculate a IMU/foot trajectory_full over an entire gait sequence using
RegionLevelTrajectory.
If you need an introduction to trajectory reconstruction in general, have a look
at:ref`this example <trajectory_stride>`.
Getting input data#
For this example we need raw IMU data and a ROI list. We use the available gaitmap example data, which is already in the correct gaitmap coordinate system. Note, that the data starts and ends in a resting period, which is important for most integration methods to work properly.
Because we only have a single gait sequence in the data, we will create a fake gait sequence list, that goes from the start to the end of the dataset.
import matplotlib.pyplot as plt
import pandas as pd
from gaitmap.example_data import get_healthy_example_imu_data, get_healthy_example_stride_events
from gaitmap.trajectory_reconstruction import RegionLevelTrajectory, RtsKalman
from gaitmap.utils.datatype_helper import get_multi_sensor_names
imu_data = get_healthy_example_imu_data()
dummy_regions_list = pd.DataFrame([[0, len(imu_data["left_sensor"])]], columns=["start", "end"]).rename_axis("gs_id")
dummy_regions_list = {k: dummy_regions_list for k in get_multi_sensor_names(imu_data)}
dummy_regions_list["left_sensor"]
Selecting and Configuring Algorithms#
Like for the stride level method we need to choose an orientation and a position algorithm.
However, as we want to perform integration over a long time period, methods that can take advatage over the multiple
regions of zero velocity (ZUPTs) to perform corrections are preferable.
Therefore, the best choice for such region is a Kalman Filter.
As this takes care of both position and orientation estimation in one go, we can pass it as a trajectory_method.
The initial orientation will automatically be estimated by the RegionLevelTrajectory class using the first
n-samples.
trajectory_method = RtsKalman()
# We set the ori and pos methods explicitly to `None` here to silence a warning indicating potential user error.
# In general, when `trajectory_method` is provided `ori_method` and `pos_method` are ignored.
trajectory_full = RegionLevelTrajectory(trajectory_method=trajectory_method, ori_method=None, pos_method=None)
Calculate and inspect results#
sampling_frequency_hz = 204.8
trajectory_full.estimate(data=imu_data, regions_of_interest=dummy_regions_list, sampling_rate_hz=sampling_frequency_hz)
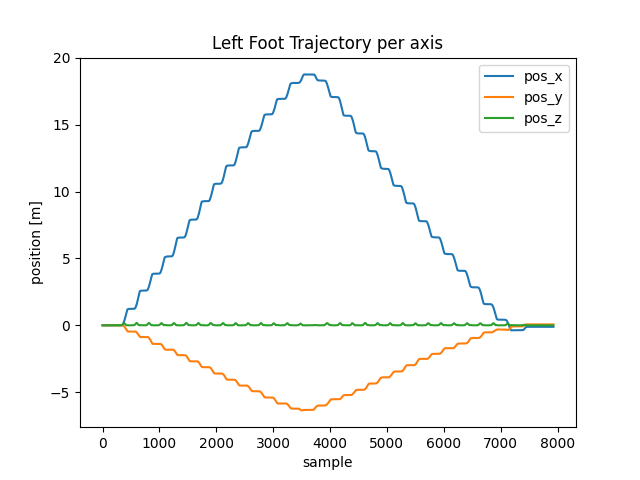
# select the position of the first (and only) gait sequence
first_region_position = trajectory_full.position_["left_sensor"].loc[0]
first_region_position.plot()
plt.title("Left Foot Trajectory per axis")
plt.xlabel("sample")
plt.ylabel("position [m]")
plt.show()
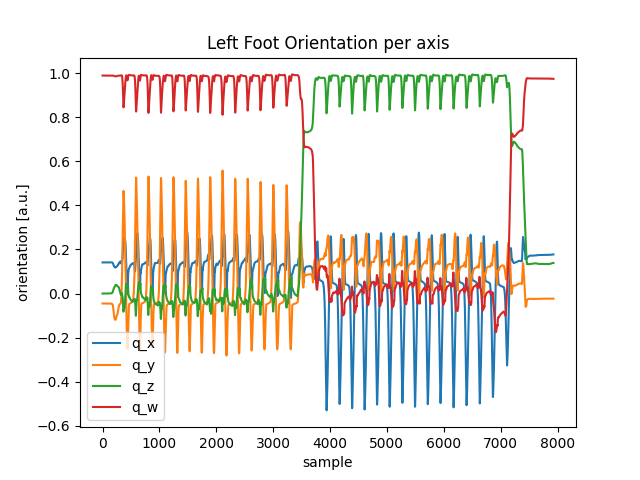
# select the orientation of the first (and only) gait sequence
first_region_orientation = trajectory_full.orientation_["left_sensor"].loc[0]
first_region_orientation.plot()
plt.title("Left Foot Orientation per axis")
plt.xlabel("sample")
plt.ylabel("orientation [a.u.]")
plt.show()
/home/docs/checkouts/readthedocs.org/user_builds/gaitmap/checkouts/v2.5.0/gaitmap/trajectory_reconstruction/_trajectory_wrapper.py:213: UserWarning: Could not use complete window length for initializing orientation.
warnings.warn("Could not use complete window length for initializing orientation.")
/home/docs/checkouts/readthedocs.org/user_builds/gaitmap/checkouts/v2.5.0/gaitmap/trajectory_reconstruction/_trajectory_wrapper.py:213: UserWarning: Could not use complete window length for initializing orientation.
warnings.warn("Could not use complete window length for initializing orientation.")
Calculate results per stride#
However, usually we are not interested in the full trajectory of a region, but the we want to know the trajectory of
the strides within it.
We can do that by first calculating the trajectory_full for the entire region and then cutting out the parts of each
stride.
This can be done in a single step using estimate_intersect, which takes an additional stride list as input.
After using this method, the result contains the stride level trajectories.
Note, that compared to the results StrideLevelTrajectory, the initial position and orientation of each stride is
different and simply taken from the calculated trajectory_full.
stride_list = get_healthy_example_stride_events()
trajectory_per_stride = trajectory_full.clone()
trajectory_per_stride.estimate_intersect(
data=imu_data,
regions_of_interest=dummy_regions_list,
stride_event_list=stride_list,
sampling_rate_hz=sampling_frequency_hz,
)
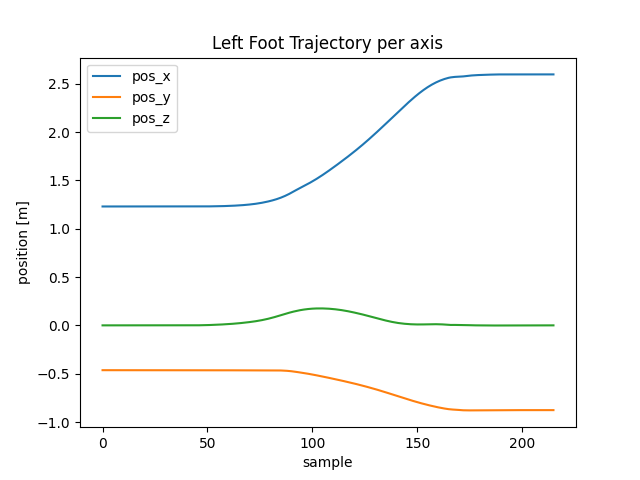
# select the position of the first stride
first_region_position = trajectory_per_stride.position_["left_sensor"].loc[0]
first_region_position.plot()
plt.title("Left Foot Trajectory per axis")
plt.xlabel("sample")
plt.ylabel("position [m]")
plt.show()
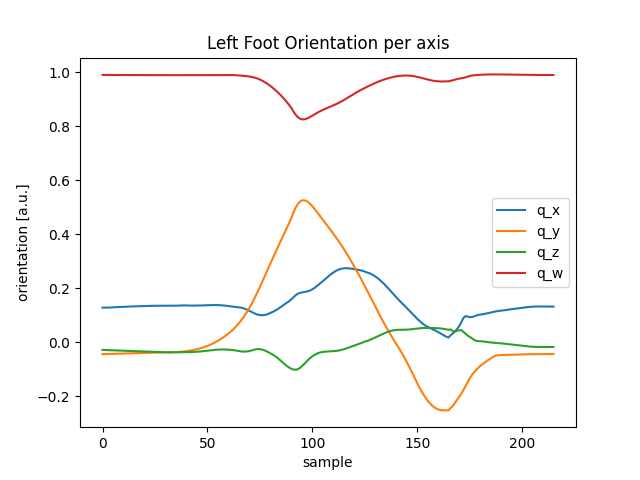
# select the orientation of the first stride
first_region_orientation = trajectory_per_stride.orientation_["left_sensor"].loc[0]
first_region_orientation.plot()
plt.title("Left Foot Orientation per axis")
plt.xlabel("sample")
plt.ylabel("orientation [a.u.]")
plt.show()
/home/docs/checkouts/readthedocs.org/user_builds/gaitmap/checkouts/v2.5.0/gaitmap/trajectory_reconstruction/_trajectory_wrapper.py:213: UserWarning: Could not use complete window length for initializing orientation.
warnings.warn("Could not use complete window length for initializing orientation.")
/home/docs/checkouts/readthedocs.org/user_builds/gaitmap/checkouts/v2.5.0/gaitmap/trajectory_reconstruction/_trajectory_wrapper.py:213: UserWarning: Could not use complete window length for initializing orientation.
warnings.warn("Could not use complete window length for initializing orientation.")
Total running time of the script: ( 0 minutes 20.918 seconds)
Estimated memory usage: 111 MB