gaitmap.stride_segmentation.hmm.PreTrainedRothSegmentationModel#
- class gaitmap.stride_segmentation.hmm.PreTrainedRothSegmentationModel[source]#
Load a pre-trained stride segmentation HMM.
Note
This algorithm is only available via the
gaitmap_madpackage and distributed under a AGPL3 licence. To use it, you need to explicitly install thegaitmap_madpackage. Learn more about that here.- Attributes:
n_statesReturn the number of states of the final model.
stride_statesReturn the ids of the stride states.
transition_statesReturn the ids of the transition states.
Notes
This model was trained on the pre-visit @lab recordings of the first 28 participants of the fallrisk-pd study. According to [1] the expected performance on unseen data under lab conditions is around 96% F1 score and under real-world conditions ca. 92% F1 score.
The model is only for level walking and was only trained on PD data (so it might not generalize well to other conditions).
Recommended use for general segmentation of straight strides. But, the model will probably also segment turning strides as it only considers the
gyr_mldata. If only straight strides are desired, strides should be filtered based on turning angle after parameter estimation.[1]Roth, N., Küderle, A., Ullrich, M. et al. Hidden Markov Model based stride segmentation on unsupervised free-living gait data in Parkinson`s disease patients. J NeuroEngineering Rehabil 18, 93 (2021). https://doi.org/10.1186/s12984-021-00883-7
Methods
clone()Create a new instance of the class with all parameters copied over.
from_json(json_str)Import an gaitmap object from its json representation.
get_params([deep])Get parameters for this algorithm.
predict(data, sampling_rate_hz)Perform prediction based on given data and given model.
self_optimize(data_sequence, ...)Create and train the HMM model based on the given data and labels.
self_optimize_with_info(data_sequence, ...)Create and train the HMM model based on the given data and labels.
set_params(**params)Set the parameters of this Algorithm.
to_json()Export the current object parameters as json.
- __init__(stride_model: SimpleHmm = cf(SimpleHmm(algo_train='baum-welch', architecture='left-right-strict', data_columns=None, max_iterations=10, model=None, n_gmm_components=6, n_jobs=1, n_states=20, name='stride_model', stop_threshold=1e-09, verbose=True)), transition_model: SimpleHmm = cf(SimpleHmm(algo_train='baum-welch', architecture='left-right-loose', data_columns=None, max_iterations=10, model=None, n_gmm_components=3, n_jobs=1, n_states=5, name='transition_model', stop_threshold=1e-09, verbose=True)), feature_transform: RothHmmFeatureTransformer = cf(RothHmmFeatureTransformer(axes=['gyr_ml'], features=['raw', 'gradient'], low_pass_filter=ButterworthFilter(cutoff_freq_hz=10.0, filter_type='lowpass', order=4), sampling_rate_feature_space_hz=51.2, standardization=True, window_size_s=0.2)), *, algo_predict: Literal['viterbi', 'map'] = 'viterbi', algo_train: Literal['viterbi', 'baum-welch'] = 'baum-welch', stop_threshold: float = 1e-09, max_iterations: int = 1, initialization: Literal['labels', 'fully-connected'] = 'labels', verbose: bool = True, n_jobs: int = 1, name: str = 'segmentation_model', model: HiddenMarkovModel | None = None, data_columns: tuple[str, ...] | None = None) None[source]#
- clone() Self[source]#
Create a new instance of the class with all parameters copied over.
This will create a new instance of the class itself and all nested objects
- classmethod from_json(json_str: str) Self[source]#
Import an gaitmap object from its json representation.
For details have a look at the this example.
You can use the
to_jsonmethod of a class to export it as a compatible json string.- Parameters:
- json_str
json formatted string
- get_params(deep: bool = True) dict[str, Any][source]#
Get parameters for this algorithm.
- Parameters:
- deep
Only relevant if object contains nested algorithm objects. If this is the case and deep is True, the params of these nested objects are included in the output using a prefix like
nested_object_name__(Note the two “_” at the end)
- Returns:
- params
Parameter names mapped to their values.
- predict(data: DataFrame, sampling_rate_hz: float) Self[source]#
Perform prediction based on given data and given model.
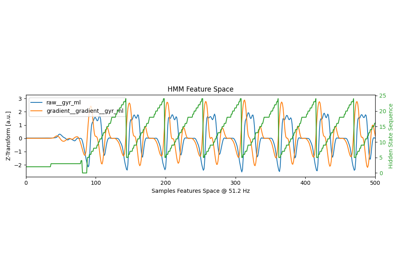
This generates the hidden state sequence and stores it in the
hidden_state_sequence_attribute. Data will first be transformed using the feature transform and then the trained model will be used to predict the individual hidden states.- Parameters:
- data
The data to predict the hidden state sequence for. Note, that this must have the same columns than the data used during training.
- sampling_rate_hz
The sampling rate of the data.
- Returns:
- self
The instance with the result objects attached.
- self_optimize(data_sequence: Sequence[DataFrame], stride_list_sequence: Sequence[DataFrame], sampling_rate_hz: float) Self[source]#
Create and train the HMM model based on the given data and labels.
This will first apply the feature transformation to the given data and then train the HMM model in three steps:
Train the stride model on the stride data
Train the transition model on the transition data
Assemble the final model by combining the stride and transition model and train it for a couple further iterations
- Parameters:
- data_sequence
Sequence of gaitmap sensordata objects.
- stride_list_sequence
Sequence of gaitmap stride lists. The number of stride lists must match the number of sensordata objects (i.e. they must belong together).
- sampling_rate_hz
Sampling frequency of the data.
- Returns:
- self
The trained model instance.
- self_optimize_with_info(data_sequence: Sequence[DataFrame], stride_list_sequence: Sequence[DataFrame], sampling_rate_hz: float) tuple[typing_extensions.Self, dict[Literal['self', 'transition_model', 'stride_model'], pomegranate.callbacks.History]][source]#
Create and train the HMM model based on the given data and labels.
This is identical to
self_optimize, but returns additional information about the training process. The dictionary returned as second parameter contains the training history for each of the three models ( stride-model, transition-model, and the combined final model “self”).- Parameters:
- data_sequence
Sequence of gaitmap sensordata objects.
- stride_list_sequence
Sequence of gaitmap stride lists. The number of stride lists must match the number of sensordata objects (i.e. they must belong together).
- sampling_rate_hz
Sampling frequency of the data.
- Returns:
- self
The trained model instance.
- history
Dictionary containing the training history for each of the three models
Examples using gaitmap.stride_segmentation.hmm.PreTrainedRothSegmentationModel#
HMM stride segmentation - Prediction with pre-trained model