gaitmap.trajectory_reconstruction.StrideLevelTrajectory#
- class gaitmap.trajectory_reconstruction.StrideLevelTrajectory(*, ori_method: BaseOrientationMethod | None = cf(SimpleGyroIntegration(initial_orientation=array([0., 0., 0., 1.]), memory=None)), pos_method: BasePositionMethod | None = cf(ForwardBackwardIntegration(gravity=array([0., 0., 9.81]), level_assumption=True, steepness=0.08, turning_point=0.5)), trajectory_method: BaseTrajectoryMethod | None = None, align_window_width: int = 8)[source]#
Estimate the trajectory over the duration of a stride by considering each stride individually.
You can select a method for the orientation estimation and a method for the position estimation (or a combined method). These methods will then be applied to each stride. This class will calculate the initial orientation of each stride assuming that it starts at a region of minimal movement (
min_vel). Some methods to dedrift the orientation or position will additionally assume that the stride also ends in a static period. Check the documentation of the individual ori and pos methods for details.- Parameters:
- ori_method
An instance of any available orientation method with the desired parameters set. This method is called with the data of each stride to actually calculate the orientation. Note, the the
initial_orientationparameter of this method will be overwritten, as this class estimates new per-stride initial orientations based on the mid-stance assumption.- pos_method
An instance of any available position method with the desired parameters set. This method is called with the data of each stride to actually calculate the position. The provided data is already transformed into the global frame using the orientations calculated by the
ori_methodon the same stride.- trajectory_method
Instead of providind a separate
ori_methodandpos_method, a singletrajectory_methodcan be provided that calculated the orientation and the position in one go. This method is called with the data of each stride. If atrajectory_methodis provided the values forori_methodandpos_methodare ignored. Note, the theinitial_orientationparameter of this method will be overwritten, as this class estimates new per-stride initial orientations based on the mid-stance assumption.- align_window_width
This is the width of the window that will be used to align the beginning of the signal of each stride with gravity. To do so, half the window size before and half the window size after the start of the stride will be used to obtain the median value of acceleration data in this phase. Note, that +-
np.floor(align_window_size/2)around the start sample will be used for this. For the first stride, start of the stride might coincide with the start of the signal. In that case the start of the window would result in a negative index, thus the window to get the initial orientation will be reduced (from 0 tostart+np.floor(align_window_size/2))
- Other Parameters:
- data
The data passed to the
estimatemethod.- stride_event_list
The event list passed to the
estimatemethod.- sampling_rate_hz
The sampling rate of the data.
- Attributes:
- orientation_
Output of the selected orientation method applied per stride. The first orientation is obtained by aligning the acceleration data at the start of each stride with gravity. This contains
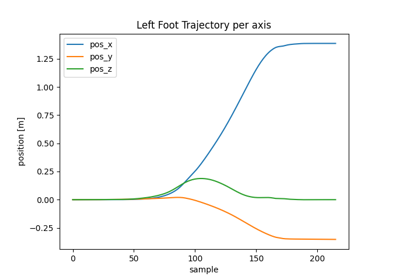
len(data) + 1orientations for each stride, as the initial orientation is included in the output.- position_
Output of the selected position method applied per stride. The initial value of the postion is assumed to be [0, 0, 0]. This contains
len(data) + 1values for each stride, as the initial position is included in the output.- velocity_
The velocity as provided by the selected position method applied per stride. The initial value of the velocity is assumed to be [0, 0, 0]. This contains
len(data) + 1values for each stride, as the initial velocity is included in the output.
See also
gaitmap.trajectory_reconstructionImplemented algorithms for orientation and position estimation
Examples
You can pick any orientation and any position estimation method that is implemented for this wrapper.
>>> from gaitmap.trajectory_reconstruction import SimpleGyroIntegration >>> from gaitmap.trajectory_reconstruction import ForwardBackwardIntegration >>> # Create custom instances of the methods you want to use >>> ori_method = SimpleGyroIntegration() >>> pos_method = ForwardBackwardIntegration() >>> # Create an instance of the wrapper >>> per_stride_traj = StrideLevelTrajectory(ori_method=ori_method, pos_method=pos_method) >>> # Apply the method >>> data = ... >>> sampling_rate_hz = 204.8 >>> stride_list = ... >>> per_stride_traj = per_stride_traj.estimate( ... data, stride_event_list=stride_list, sampling_rate_hz=sampling_rate_hz ... ) >>> per_stride_traj.position_ <Dataframe or dict with all the positions per stride> >>> per_stride_traj.orientation_ <Dataframe or dict with all the orientations per stride>
Methods
clone()Create a new instance of the class with all parameters copied over.
estimate(data, stride_event_list, *, ...)Use the initial rotation and the gyroscope signal to estimate the orientation to every time point .
from_json(json_str)Import an gaitmap object from its json representation.
get_params([deep])Get parameters for this algorithm.
set_params(**params)Set the parameters of this Algorithm.
to_json()Export the current object parameters as json.
- __init__(*, ori_method: BaseOrientationMethod | None = cf(SimpleGyroIntegration(initial_orientation=array([0., 0., 0., 1.]), memory=None)), pos_method: BasePositionMethod | None = cf(ForwardBackwardIntegration(gravity=array([0., 0., 9.81]), level_assumption=True, steepness=0.08, turning_point=0.5)), trajectory_method: BaseTrajectoryMethod | None = None, align_window_width: int = 8) None[source]#
- clone() Self[source]#
Create a new instance of the class with all parameters copied over.
This will create a new instance of the class itself and all nested objects
- estimate(data: DataFrame | dict[Union[collections.abc.Hashable, str], pandas.core.frame.DataFrame], stride_event_list: DataFrame | dict[Union[collections.abc.Hashable, str], pandas.core.frame.DataFrame], *, sampling_rate_hz: float) Self[source]#
Use the initial rotation and the gyroscope signal to estimate the orientation to every time point .
- Parameters:
- data
At least must contain 3D-gyroscope and 3D-accelerometer data.
- stride_event_list
List of events for one or multiple sensors. For each stride, the orientation and position will be calculated separately. The events per strides will be forwarded as the optional stride list to the underlying ori/pos/traj method.
- sampling_rate_hz
Sampling rate with which IMU data was recorded.
- classmethod from_json(json_str: str) Self[source]#
Import an gaitmap object from its json representation.
For details have a look at the this example.
You can use the
to_jsonmethod of a class to export it as a compatible json string.- Parameters:
- json_str
json formatted string
- get_params(deep: bool = True) dict[str, Any][source]#
Get parameters for this algorithm.
- Parameters:
- deep
Only relevant if object contains nested algorithm objects. If this is the case and deep is True, the params of these nested objects are included in the output using a prefix like
nested_object_name__(Note the two “_” at the end)
- Returns:
- params
Parameter names mapped to their values.