Note
Click here to download the full example code
SegmentationModel Training#
This example illustrates how a Hidden Markov Model (HMM) implemented by the
RothSegmentationHmm can be trained from IMU data and presegmented stride lists.
The used implementation is based on the work of Roth et al [1]
import numpy as np
from matplotlib import pyplot as plt
np.random.seed(1)
Getting some example data#
For this we take some example data that contains the regular walking movement during a 2x20m walk test of a healthy subject. The IMU signals are already rotated so that they align with the gaitmap SF coordinate system. The data contains information from two sensors - one from the right and one from the left foot.
from gaitmap.example_data import get_healthy_example_imu_data
data = get_healthy_example_imu_data()
sampling_rate_hz = 204.8
data.sort_index(axis=1).head(1)
Preparing the data#
The HMM only makes use of the gyro information. Further, if you use this model, your data is expected to be in the gaitmap body-frame to be able to use the same model for the left and the right foot. Therefore, we need to transform the dataset into the body frame.
from gaitmap.utils.coordinate_conversion import convert_to_fbf
# We use the `..._like` parameters to identify the data of the left and the right foot based on the name of the sensor.
bf_data = convert_to_fbf(data, left_like="left_", right_like="right_")
Getting the example stride list#
For this we take the ground truth stride list provided with the example data.
For new data this stride list can be generated by running the algorithms provided in the
stride_segmentation module and then manually corrected, or by creating a stride list using ground
truth data.
from gaitmap.example_data import get_healthy_example_stride_borders
stride_list = get_healthy_example_stride_borders()
from gaitmap.data_transform import ButterworthFilter
Initialize Model Parameters - Feature Transformation#
Here we define the feature space in which model training and later prediction will take place. You can choose different axis and or feature combinations as well as downsampling, filter and standardization steps. The following example has proved to work well in most cases.
from gaitmap.stride_segmentation.hmm import RothHmmFeatureTransformer
feature_transform = RothHmmFeatureTransformer(
sampling_rate_feature_space_hz=51.2,
axes=["gyr_ml"],
features=["raw", "gradient"],
low_pass_filter=ButterworthFilter(order=4, cutoff_freq_hz=10),
window_size_s=0.2,
standardization=True,
)
Initialize Model Parameters - Sub HMMs#
The segmentation process is defined as a two-class problem, namely “strides” and “transitions/null”. For each class we define a separate HMM and define all its components. Notice that the stride and transition model are different in architecture, number of states or number of gaussian mixture model (GMM) components. In this example all configurable parameters are exposed. These parameters might require optimization for your specific type of dataset!
from gaitmap.stride_segmentation.hmm import SimpleHmm
stride_model = SimpleHmm(
n_states=20,
n_gmm_components=6,
algo_train="baum-welch",
stop_threshold=1e-9,
max_iterations=5,
architecture="left-right-strict",
verbose=True,
name="stride_model",
)
transition_model = SimpleHmm(
n_states=5,
n_gmm_components=3,
algo_train="baum-welch",
stop_threshold=1e-9,
max_iterations=5,
architecture="left-right-loose",
verbose=True,
name="transition_model",
)
Initialize Model Parameters - Segmentation Model#
Finally we can combine the feature extraction and our defined sub-HMMs to the actual segmentation model were we can invoke the training process. Again, all configurable parameters are exposed for demonstration purpose. These parameters should again work for most usecases.
from gaitmap.stride_segmentation.hmm import RothSegmentationHmm
segmentation_model = RothSegmentationHmm(
stride_model=stride_model,
transition_model=transition_model,
feature_transform=feature_transform,
algo_predict="viterbi",
algo_train="baum-welch",
stop_threshold=1e-9,
max_iterations=1,
initialization="labels",
verbose=True,
name="segmentation_model",
)
Prepare Data for Training#
The HMM does not differentiate between left or right strides, (this is why we must have our data in the body-frame convention!). The main input format for the training process are gait sequences which include transitions as well as valid strides. To train on multiple sequences, we can just feed a list of gaitsequences into the model for training. For each gait sequence we also need to have a valid stride list. In this example we handle the data from the left and right foot as separate gait sequences and add them to a simple list. We have to do the same for the stride lists.
data_train_sequence = [bf_data["left_sensor"], bf_data["right_sensor"]]
stride_list_sequence = [stride_list["left_sensor"], stride_list["right_sensor"]]
Training#
Finally! Sit back relax and let the magic happen (depending on the number of input sequences this can take up to >30min). However, this small example runs quite fast! The model will internally perform the feature transformation of the dataset, train the individual sub models and finally combine them to a flatted segmentation model.
segmentation_model = segmentation_model.self_optimize(
data_train_sequence, stride_list_sequence, sampling_rate_hz=sampling_rate_hz
)
[1] Improvement: 341.2437178557084 Time (s): 0.2085
[2] Improvement: 109.29279107726325 Time (s): 0.2077
[3] Improvement: 25.279694613596803 Time (s): 0.2082
[4] Improvement: 52.723999946801996 Time (s): 0.2078
[5] Improvement: -3.5209243279850853 Time (s): 0.2088
Total Training Improvement: 525.0192791653853
Total Training Time (s): 1.2424
/home/docs/checkouts/readthedocs.org/user_builds/gaitmap/checkouts/v2.6.0/packages/gaitmap_mad/src/gaitmap_mad/stride_segmentation/hmm/_utils.py:333: UserWarning: During training the improvement per epoch became NaN/infinite or negative! Run `self_optimize_with_info` and inspect the history element for more information. With a high likelihood, the final model is not usable and will result in errors during prediction. This usually happens when there is not enough data for a large number of distributions and states. To avoid this issue, reduce the number of distributions per state or the number of states. Or ideally, provide more data.
warnings.warn(
[1] Improvement: 723.4614150029679 Time (s): 0.008724
[2] Improvement: 62.761125573766094 Time (s): 0.009014
[3] Improvement: 28.507724633026555 Time (s): 0.009044
[4] Improvement: 16.114249821317117 Time (s): 0.008944
[5] Improvement: 33.07876970054485 Time (s): 0.00881
Total Training Improvement: 863.9232847316225
Total Training Time (s): 0.0545
[1] Improvement: 43.84714447262195 Time (s): 0.2094
Total Training Improvement: 43.84714447262195
Total Training Time (s): 0.4585
Inspecting the Results#
Now all internal models which were initialized as “None” should be populated by pomegranate models. We can now have a look at the final transition matrix or the trained distributions (GMMs). You could now either use the model to predict stride borders on an unseen sequence or save it to a json file for later use.
np.set_printoptions(precision=3, linewidth=180, suppress=True)
print(segmentation_model.model.dense_transition_matrix()[0:-2, 0:-2])
print(segmentation_model.model.states[10])
[[0.891 0.109 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0.925 0.075 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0.86 0.14 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0.949 0.051 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0.158 0. 0. 0. 0.795 0.047 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0.667 0.333 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0.669 0.331 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0.627 0.373 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0.716 0.284 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0.664 0.336 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.666 0.334 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.652 0.348 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.589 0.411 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.516 0.484 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.527 0.473 0. 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.525 0.475 0. 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.447 0.553 0. 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.632 0.368 0. 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.82 0.18 0. 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.494 0.506 0. 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.618 0.382 0. 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.67 0.33 0. 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.647 0.353 0. ]
[0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.645 0.355]
[0.017 0. 0. 0. 0. 0.304 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.68 ]]
{
"class" : "State",
"distribution" : {
"class" : "GeneralMixtureModel",
"distributions" : [
{
"class" : "Distribution",
"name" : "MultivariateGaussianDistribution",
"parameters" : [
[
1.5126628727953728,
-1.2325509070704483
],
[
[
0.005687593991405892,
0.0023472485533848997
],
[
0.0023472485533848997,
0.040877832841576395
]
]
],
"frozen" : false
},
{
"class" : "Distribution",
"name" : "MultivariateGaussianDistribution",
"parameters" : [
[
1.246494912094264,
-1.5631885798768912
],
[
[
0.02247323938290144,
0.00967374480066069
],
[
0.00967374480066069,
0.04359681875993598
]
]
],
"frozen" : false
},
{
"class" : "Distribution",
"name" : "MultivariateGaussianDistribution",
"parameters" : [
[
-0.14468908268310057,
-0.32692151837939903
],
[
[
0.004734574595004851,
-0.007669695586920108
],
[
-0.007669695586920108,
0.01245693964354575
]
]
],
"frozen" : false
},
{
"class" : "Distribution",
"name" : "MultivariateGaussianDistribution",
"parameters" : [
[
1.7391578250883177,
-1.4912029930432096
],
[
[
0.0011035263021169747,
0.002104007563097542
],
[
0.002104007563097542,
0.0349554610296975
]
]
],
"frozen" : false
},
{
"class" : "Distribution",
"name" : "MultivariateGaussianDistribution",
"parameters" : [
[
1.1445625377737405,
-1.7356582771533349
],
[
[
0.015585621689172442,
-0.01362748197089966
],
[
-0.01362748197089966,
0.031239367536969237
]
]
],
"frozen" : false
},
{
"class" : "Distribution",
"name" : "MultivariateGaussianDistribution",
"parameters" : [
[
0.7189351972580712,
-1.886781134785975
],
[
[
0.02468903546241029,
0.00967892554067703
],
[
0.00967892554067703,
0.02033165397565948
]
]
],
"frozen" : false
}
],
"weights" : [
0.30984372119247067,
0.27134257464797806,
0.01725767107205237,
0.041169920711634715,
0.09302063408620882,
0.2673654782896554
]
},
"name" : "sa",
"weight" : 1.0
}
Applying the Model to a Sequence#
in the follwoing we will apply the model to the same sequence we used for training, just to show that the model “learned” something. We will also plot the results to see how well the model performs.
from gaitmap.stride_segmentation.hmm import HmmStrideSegmentation
hmm = HmmStrideSegmentation(segmentation_model).segment(bf_data, sampling_rate_hz=sampling_rate_hz)
hmm.stride_list_
{'left_sensor': start end
s_id
0 364 584
1 584 802
2 802 1023
3 1023 1242
4 1242 1458
5 1458 1672
6 1672 1887
7 1887 2104
8 2104 2327
9 2327 2546
10 2546 2773
11 2773 2998
12 2998 3231
13 3231 3466
14 3934 4163
15 4163 4382
16 4382 4603
17 4603 4822
18 4822 5043
19 5043 5267
20 5267 5489
21 5489 5713
22 5713 5936
23 5936 6167
24 6167 6395
25 6395 6628
26 6628 6858
27 6858 7107, 'right_sensor': start end
s_id
0 475 691
1 691 913
2 913 1133
3 1133 1350
4 1350 1565
5 1565 1779
6 1779 1995
7 1995 2216
8 2216 2436
9 2436 2659
10 2659 2887
11 2887 3114
12 3114 3351
13 3351 3567
14 3567 3816
15 3816 4049
16 4049 4274
17 4274 4492
18 4492 4712
19 4712 4933
20 4933 5153
21 5153 5381
22 5381 5601
23 5601 5826
24 5826 6051
25 6051 6280
26 6280 6511
27 6511 6742
28 6742 6966
29 6966 7246}
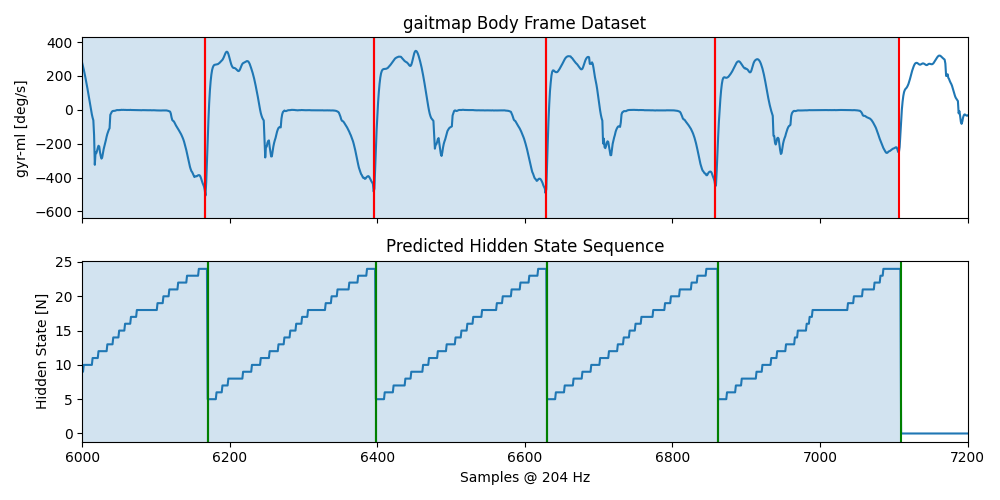
Plotting the Results#
sensor = "left_sensor"
fig, axs = plt.subplots(nrows=2, sharex=True, figsize=(10, 5))
axs[0].set_title("gaitmap Body Frame Dataset")
axs[0].plot(bf_data.reset_index(drop=True)[sensor]["gyr_ml"])
for start, end in hmm.stride_list_["left_sensor"].to_numpy():
axs[0].axvline(start, c="r")
axs[0].axvline(end, c="r")
axs[0].axvspan(start, end, alpha=0.2)
axs[0].set_ylabel("gyr-ml [deg/s]")
axs[1].set_title("Predicted Hidden State Sequence")
axs[1].plot(hmm.hidden_state_sequence_[sensor])
for start, end in hmm.matches_start_end_original_[sensor]:
axs[1].axvline(start, c="g")
axs[1].axvline(end, c="g")
axs[1].axvspan(start, end, alpha=0.2)
axs[1].set_ylabel("Hidden State [N]")
axs[1].set_xlabel("Samples @ %d Hz" % sampling_rate_hz)
plt.xlim([6000, 7200])
fig.tight_layout()
plt.show()
Total running time of the script: ( 0 minutes 6.260 seconds)
Estimated memory usage: 9 MB