gaitmap.trajectory_reconstruction.MahonyAHRS#
- class gaitmap.trajectory_reconstruction.MahonyAHRS(kp: float = 1.0, ki: float = 0.0, initial_orientation: ndarray | Rotation = cf(array([0., 0., 0., 1.])), use_magnetometer: bool = False, memory: Memory | None = None)[source]#
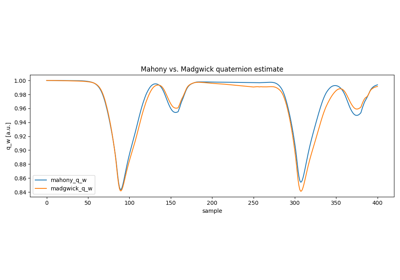
The MahonyAHRS algorithm to estimate the orientation of an IMU.
This method applies gyroscope integration with proportional-integral feedback based on the estimated gravity direction from the accelerometer data. If requested, the magnetometer can be used as an additional heading reference. This implementation is based on the paper [1] and the open source x-io reference implementation [2].
- Parameters:
- kp
Proportional gain of the feedback term. Higher values make the algorithm react faster to accelerometer or magnetometer based corrections. A value of 0 disables the proportional correction.
- ki
Integral gain of the feedback term. This term can compensate constant gyro bias over time, but can also introduce drift or overshoot if chosen too large. A value of 0 disables the integral correction.
- initial_orientation
The initial orientation of the sensor that is assumed. It is critical that this value is close to the actual orientation. Otherwise, the estimated orientation will drift until the real orientation is found. If you pass an array, the element order must be x, y, z, w.
- use_magnetometer
If the magnetometer data should be used to correct the orientation. This requires magnetometer columns to be present in the input data. If True, the Mahony AHRS variant with magnetic heading correction will be used.
- memory
An optional
joblib.Memoryobject that can be provided to cache the calls to the Mahony update series.
- Other Parameters:
- data
The data passed to
estimate. It must be a single-sensor dataframe with accelerometer and gyroscope columns in the sensor frame. Ifuse_magnetometer=True, magnetometer columns are required as well.- sampling_rate_hz
The sampling rate of
datain Hz.
- Attributes:
orientation_Orientations as pd.DataFrame.
- orientation_object_
The orientations as a single scipy Rotation object.
rotated_data_Rotated data.
See also
gaitmap.trajectory_reconstructionOther implemented algorithms for orientation and position estimation
gaitmap.trajectory_reconstruction.StrideLevelTrajectoryApply the method for each stride of a stride list.
Notes
This class uses Numba as a just-in-time compiler to achieve fast run times. As a result, the first execution of the algorithm will take longer because the methods need to be compiled first.
[1]Mahony, R., Hamel, T., & Pflimlin, J.-M. (2008). Nonlinear complementary filters on the special orthogonal group. IEEE Transactions on Automatic Control, 53(5), 1203-1218. https://doi.org/10.1109/TAC.2008.923738
Examples
Your data must be a pd.DataFrame with columns defined by
SF_COLSorSF_COLS_WITH_MAG.>>> import numpy as np >>> import pandas as pd >>> from gaitmap.utils.consts import SF_COLS >>> data = pd.DataFrame(..., columns=SF_COLS) >>> sampling_rate_hz = 100 >>> mahony = MahonyAHRS(kp=0.8, ki=0.05, initial_orientation=np.array([0, 0, 0, 1.0])) >>> mahony = mahony.estimate(data, sampling_rate_hz=sampling_rate_hz) >>> mahony.orientation_ <pd.DataFrame with resulting quaternions> >>> mahony.orientation_object_ <scipy.Rotation object>
Methods
clone()Create a new instance of the class with all parameters copied over.
estimate(data, *, sampling_rate_hz, **_)Estimate the orientation of the sensor.
from_json(json_str)Import an gaitmap object from its json representation.
get_params([deep])Get parameters for this algorithm.
set_params(**params)Set the parameters of this Algorithm.
to_json()Export the current object parameters as json.
- __init__(kp: float = 1.0, ki: float = 0.0, initial_orientation: ndarray | Rotation = cf(array([0., 0., 0., 1.])), use_magnetometer: bool = False, memory: Memory | None = None) None[source]#
- clone() Self[source]#
Create a new instance of the class with all parameters copied over.
This will create a new instance of the class itself and all nested objects
- estimate(data: DataFrame, *, sampling_rate_hz: float, **_) Self[source]#
Estimate the orientation of the sensor.
- Parameters:
- data
Continuous sensor data including gyro and acc values. If
use_magnetometer=True, magnetometer values must be present as well. The gyroscope data is expected to be in deg/s.- sampling_rate_hz
The sampling rate of the data in Hz.
- Returns:
- self
The class instance with all result attributes populated.
- classmethod from_json(json_str: str) Self[source]#
Import an gaitmap object from its json representation.
For details have a look at the this example.
You can use the
to_jsonmethod of a class to export it as a compatible json string.- Parameters:
- json_str
json formatted string
- get_params(deep: bool = True) dict[str, Any][source]#
Get parameters for this algorithm.
- Parameters:
- deep
Only relevant if object contains nested algorithm objects. If this is the case and deep is True, the params of these nested objects are included in the output using a prefix like
nested_object_name__(Note the two “_” at the end)
- Returns:
- params
Parameter names mapped to their values.